



24小時服務熱線:
400-1846-454




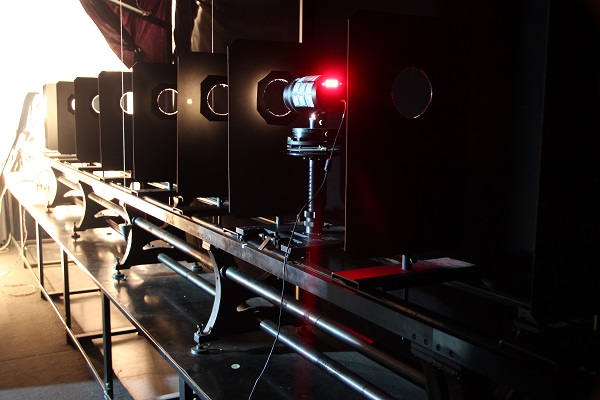
深圳中為檢驗提供激光雷達檢測服務,我司的激光雷達檢測主要是激光雷達性能檢測。
")
激光雷達的發展
激光雷達(LiDAR,Light Detection And Ranging 或 Laser Imaging Detection And Ranging)的發展歷史是一個逐步演化的過程,涉及了多項技術進步和應用領域的擴展。
20世紀60年代:激光雷達早期探索
1960年,世界上第一臺激光器誕生,這為激光雷達的出現奠定了基礎。
1968年,美國Syracuse大學的Hickman和Hogg開發了第一個激光海水深度測量系統,標志著激光雷達技術的早期應用。
20世紀70年代至80年代:激光雷達初步應用
激光雷達技術開始被用于地球科學領域,包括地形測繪和大氣研究。
1970年代,NASA的Apollo 15任務攜帶了激光高度計,用于月球表面地形的測量。
20世紀90年代:激光雷達商業化和技術成熟
激光雷達技術進一步成熟,開始出現商業化的激光雷達系統。
1990年代初,激光雷達被用于地形勘測,例如森林覆蓋率的監測和考古學調查。
21世紀初:激光雷達廣泛應用與技術革新
2000年代,隨著GPS和IMU(慣性測量單元)技術的進步,激光雷達系統變得更加準確和可靠。
激光雷達在遙感、地理信息系統(GIS)、制圖、災害管理等領域得到廣泛應用。
2010年代至今:激光雷達自動駕駛與消費級市場
2010年代,激光雷達成為自動駕駛車輛的關鍵傳感器,用于環境感知和障礙物檢測。
技術發展推動了激光雷達的小型化、低成本化,使其進入消費級市場,如無人機航拍、智能手機的深度感應等。
2021年被認為是車載激光雷達的量產啟動元年,標志著激光雷達技術在汽車行業的大規模應用。
激光雷達技術分類與迭代
機械式激光雷達:最早期的激光雷達,通過機械旋轉實現360度掃描,但存在體積大、成本高、可靠性低的問題。
半固態和固態激光雷達:隨著MEMS(微機電系統)和OPA(光學相控陣)技術的發展,激光雷達逐漸向小型化、低成本和高性能方向發展。
車載級激光雷達和純視覺方案的技術之爭
激光雷達(LiDAR)與純視覺方案在自動駕駛技術中分別扮演著重要的角色,兩者在感知環境的能力、成本、可靠性和適用場景方面有著顯著的不同。
激光雷達的優點
精確的距離和位置信息:激光雷達能夠提供精確的三維點云數據,即物體的位置、距離和尺寸,這對于構建高精度地圖和障礙物檢測非常關鍵。
全天候性能:激光雷達在夜間、霧、雨、雪等惡劣天氣條件下的表現相對穩定,不像攝像頭那樣容易受到光線條件的影響。
高速動態范圍:激光雷達可以快速掃描環境,即使在高速行駛的情況下也能保持良好的感知能力。
障礙物檢測:激光雷達可以有效檢測到前方的障礙物,包括靜止和移動的物體,這對于避免碰撞至關重要。
激光雷達的局限性
成本:激光雷達的制造和維護成本較高,尤其是高精度的激光雷達,這限制了其在大規模部署中的應用。
體積與重量:傳統的機械式激光雷達體積較大,重量較重,可能不適合所有類型的車輛集成。
環境因素:盡管激光雷達在惡劣天氣下表現較好,但在某些極端條件下(如強降雨或濃霧)其性能也會受到影響。
功耗:激光雷達的功耗相對較高,對于電動汽車的續航能力可能產生一定影響。
純視覺方案的優點
成本效益:攝像頭的成本相對較低,且隨著技術的進步,其性能和可靠性正在不斷提高。
豐富的環境信息:攝像頭可以捕捉顏色、紋理、形狀等視覺信息,對于識別交通信號、道路標記和行人行為非常有用。
接近人類駕駛方式:純視覺方案模仿了人類駕駛員的視覺感知方式,這可能使其在某些情境下更易于理解和適應。
數據驅動的學習:基于大量數據集,純視覺方案可以通過深度學習算法不斷優化和自我完善。
純視覺方案的局限性
光照和天氣敏感性:在低光照或惡劣天氣條件下,攝像頭的性能可能會下降。
深度感知:相比于激光雷達,純視覺方案在獲取精確的深度信息方面可能較為困難,尤其是在遠距離。
數據處理復雜性:視覺數據的處理需要強大的計算資源,這可能導致延遲和更高的功耗。
激光雷達檢測包括了哪些檢測?
激光雷達檢測包括了激光雷達安全檢測和激光雷達性能檢測。
激光雷達安全檢測主要還是激光雷達人眼安全檢測。
激光雷達性能檢測內容就比較多,包括了激光雷達的各項性能參數檢測。
深圳中為檢驗是專業的激光檢測機構,能夠提供激光雷達性能檢測服務。
激光雷達性能檢測包括了下面這些檢測項目:
序號 | 參數 |
1 | 平均功率 |
2 | 峰值功率 |
3 | 脈沖能量 |
4 | 脈沖能量不穩定度 |
5 | 中心波長 |
6 | 峰值波長 |
7 | 邊模抑制比 |
8 | 光譜線寬 |
9 | 光束發散角(單點) |
10 | 快軸發散角(面陣) |
11 | 慢軸發散角(面陣) |
12 | 光斑尺寸(單點) |
13 | 脈沖寬度 |
14 | 脈寬不穩定度 |
15 | 重復頻率 |
序號 | 名稱 |
測距性能 | |
1 | 測距精度 |
2 | 測距準度 |
3 | 最大探測距離(最大測程) |
4 | 最小探測距離(盲區) |
角度性能 | |
5 | 角度準確度 |
6 | 水平視場角 |
7 | 垂直視場角 |
8 | 水平角度分辨率 |
9 | 垂直角度分辨率 |
10 | 水平角度分辨力 |
11 | 垂直角度分辨力 |
12 | 漏檢角 gap |
反射性能 | |
13 | 不同反射率板的反射強度 |
14 | 不同距離下的反射強度 |
15 | 反射強度的一致性 |
其他性能 | |
16 | 拖點 |
17 | 點頻 |
18 | 幀頻 |
19 | 同向干擾 |
20 | 對向干擾 |
21 | 紅外干擾 |
如果您有激光雷達需要檢測,歡迎來電咨詢,洽談合作!
































返回頂部

電話:400-1846-454

地址:深圳市龍崗區橫崗街道橫崗社區力嘉路109號
 激光設備檢測
激光設備檢測 當前位置:
當前位置: 




 網站備案:
網站備案: 公安網備案:
公安網備案:


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}