



24小時服務(wù)熱線:
400-1846-454




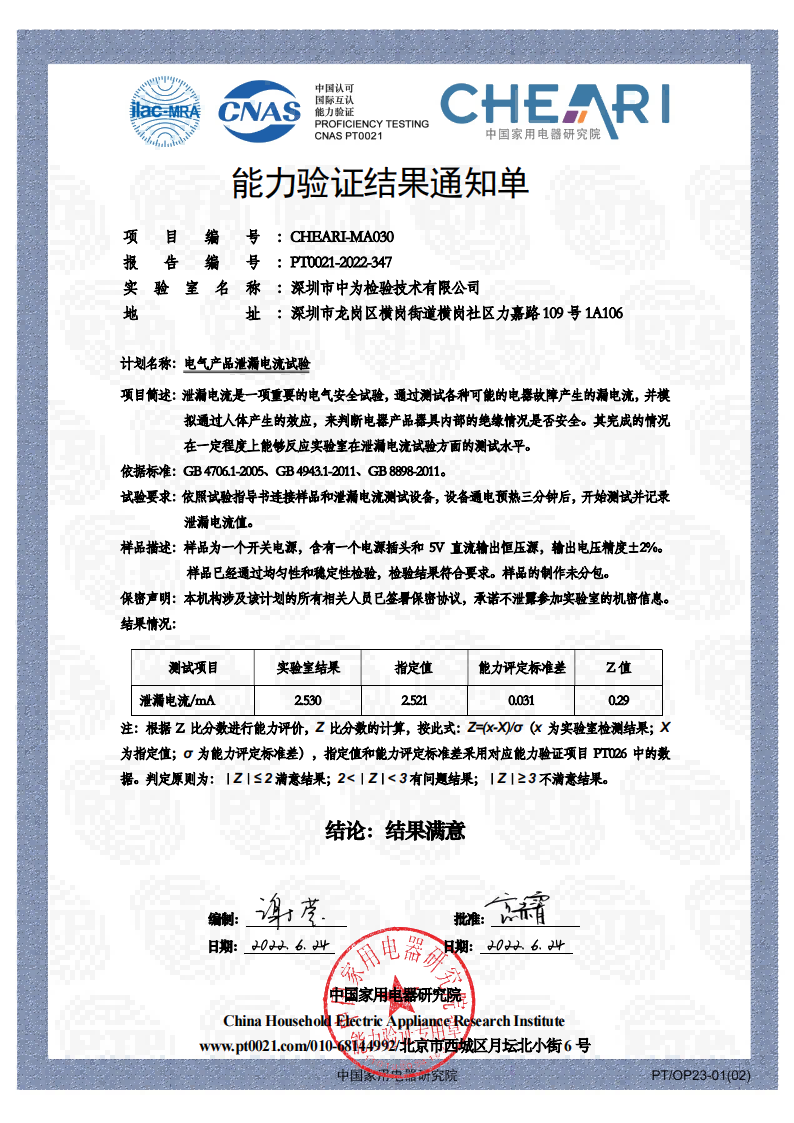
LiDAR原理介紹與性能測試(圖1)")
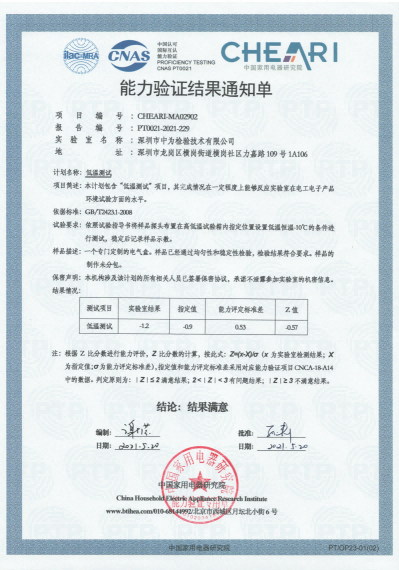
LiDAR原理介紹與性能測試(圖2)")
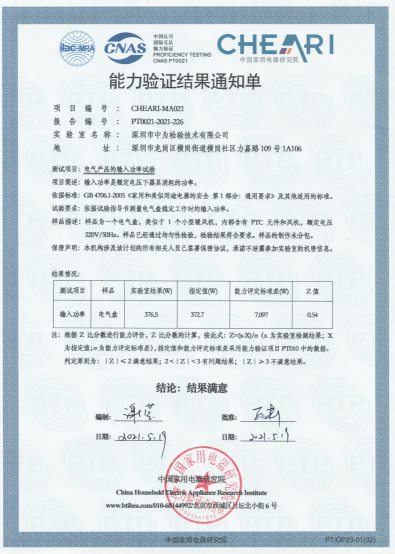
LiDAR原理介紹與性能測試(圖3)")
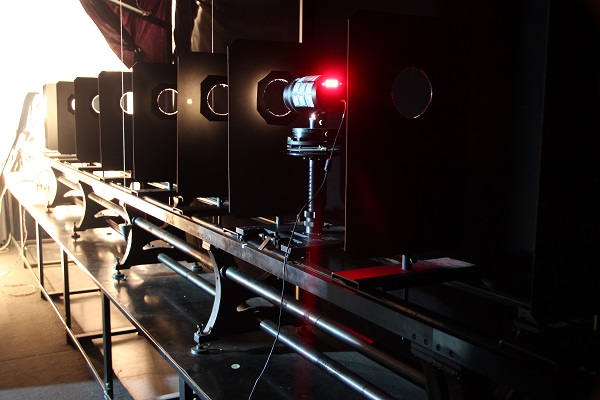
LiDAR原理介紹與性能測試(圖4)")
LiDAR原理介紹與性能測試(圖5)")
LiDAR原理介紹與性能測試(圖6)")
LiDAR原理介紹與性能測試(圖7)")
LiDAR原理介紹與性能測試(圖8)")
































返回頂部

電話:400-1846-454

地址:深圳市龍崗區(qū)橫崗街道橫崗社區(qū)力嘉路109號
 網(wǎng)站備案:粵ICP備2020126073號
網(wǎng)站備案:粵ICP備2020126073號
 公安網(wǎng)備案:公安網(wǎng)備44030602005252號
網(wǎng)絡(luò)違法信息舉報平臺
公安網(wǎng)備案:公安網(wǎng)備44030602005252號
網(wǎng)絡(luò)違法信息舉報平臺
 激光設(shè)備檢測
激光設(shè)備檢測 當(dāng)前位置:
當(dāng)前位置: 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}